






- 产品简介
- 性能特点
- 规格参数
- 应用领域
产品简介:
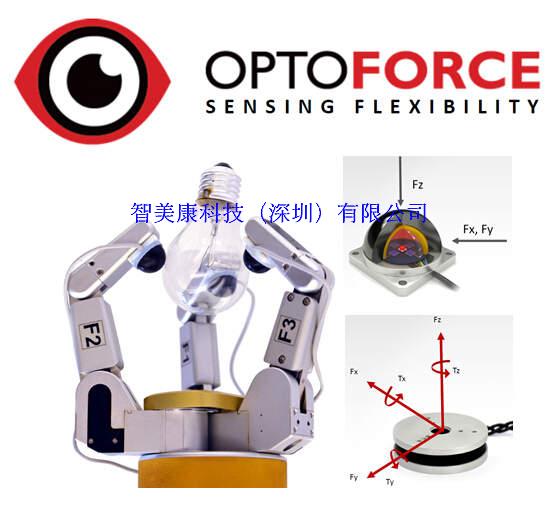
匈牙利OPTOFORCE公司研发生产的六轴力传感器,多维力传感器,多维力传感器测量,力测量方案,三维力测量,三轴向力传感器,触角传感器,指尖传感器,性价比特别高。公司致力于解决机器触觉传感及人机触觉交互应用。传感器基于精密光学方法获取形变量并通过先进核心算法求解获得受力和力矩数据,数值稳定可靠;支持多种机器人手臂末端安装。
产品主要特点及性能参数:
1. OMD-10-SA-10N 特点:
测量三维力:10N
精度高,正常精度为1%,特制产品精度高于1%
对化学反应不敏感
产品的设计可按需求调节
防尘防水设计抗高过载设计设计坚固,使用简单明了
可靠性高
低电源消耗
感应表面采用硅橡胶
传感器基座:PCB板
操作温度:PCB基座版:-40度到85度
测量特性:FZ方向可以承受三倍的过载
2. OMD-20-SA-60N
测量三维力:60 N
精度高,正常精度为1%,特制产品精度高于1%
对化学反应不敏感
产品的设计可按需求调节
防尘防水设计
抗高过载设计
设计坚固,使用简单明了
可靠性高
低电源消耗
感应表面采用硅橡胶
传感器基座:金属或ABS(塑料)
操作温度:
塑料基座板:-10度到40度
金属基座版:-40度到85度
测量特性:FZ方向可以承受六倍的过载
3. OMD-30-SA-100N:
测量三维力: 100N
精度高,正常精度为1%,特制产品精度高于1%
对化学反应不敏感
产品的设计可按需求调节
防尘防水设计
抗高过载设计
设计坚固,使用简单明了
可靠性高
低电源消耗
感应表面采用硅橡胶
传感器基座:金属或ABS(塑料)
操作温度:
塑料基座板:-10度到40度
金属基座版:-40度到85度
测量特性:FZ方向可以承受六倍的过载
4. OMD-30-FA-1600N
测量三维力: 1600N
精度高,正常精度为1%,特制产品精度高于1%
对化学反应不敏感
产品的设计可按需求调节
防尘防水设计
抗高过载设计
设计坚固,使用简单明了
可靠性高
低电源消耗
感应表面采用硅橡胶
传感器基座:金属(塑料)
操作温度:
金属基座版:-40度到85度
测量特性:
压力范围:1600N
拉力范围:200N
FZ方向可以承受二倍的过载
5. HEX-80-RA-3200 六维力/扭矩(F/T)传感器
精度高,正常精度为1%,特制产品精度高于1%
对化学反应不敏感
产品的设计可按需求调节
防尘防水设计
抗高过载设计
设计坚固,使用简单明了
可靠性高
低电源消耗
感应表面采用高强度的硅橡胶
传感器基座:铝6062
操作温度:
-40度到85度
测量特性:
F(Z+):3200 N
F(X),(Y),(Z):350N
T:10 NM
6.HEX-70-XE-200N 六轴向力矩传感器:
(1) FX=FY=FZ=200N,最好分辨率:Z=0.133N, FX=FY: 0.022N
(2)非线性度:±2%
(3)多轴力测量
(4)高分辨率
(5)适应性强的产品设计
(6)防尘防水(IP65)
(7)高过载范围
(8)机械耐冲击
(9)成本有效的解决方案
(10)易于集成
主要用于工业机器人的手臂。
7.世界上第一个带力反馈的智能旋钮
可以获得以下关键数据:
1. 线性和非线性的弹簧模拟
2. 位置/扭矩/速度
OPTOFORCE 的传感器的以下物理参数可以订制:
1. 表面大小和直径
2. 表面材料
3. 表面外观
4. 表面形状
5. 测量范围
6. 传感器基座
7. 传感器安装架
量 程 形变量
Fxy ± 200 N ± 1.7 mm
Fz ± 200 N ± 0.3 mm
Txy ± 10 Nm ± 2 °
Tz ± 6.5 Nm ± 5 °
典型应用:
1. 智能搬运
2. 机器人手指和机器人腿及整个机器人
3. 拉压力测量
4. 自动化测量和控制
5. 风洞试验
产品广泛应用于智能搬运、装配机器人、打磨机器人、协作机器人、外骨骼机器人、医疗康复机器人、机器灵巧手和机器人腿部、自动化测量和控制、风洞试验等众多领域。
索要产品更详细PDF技术资料,请与淘宝客服联系, 加QQ: 425601986 或电话:13048972929找刘先生联系。 Email: liulijun18@126.com。

